Helicopter UAV

Current HQP: R. Tatsambon (PDF), N. Vitzilaios (PDF), H. Xie (Ph.D.), N. Cao (Ph.D.), L. Hou (Ph.D.), M. Barczyk (Ph.D.), B. Godbolt (Ph.D.), A. Vasudevan (undergrad)
Past Students: D. Kastelan (M.Sc.), J. Fandino (M.Sc.), M. Jost (Dipl.-Ing.), K. Listmann (Dipl.-Ing.), K. Holstein (Dipl.-Ing.), H. Senanayake (M.Eng.), D. Sirbu (undergrad), P. Eruvbetine (undergrad)
Background
This research project investigates the development and experimental validation of nonlinear control methods on an autonomous helicopter unmanned aerial vehicle (UAV). Autonomous model helicopters have been proven to be useful in many applications where human presence would be impossible or hazardous. Popularity of helicopters as unmanned autonomous vehicles is due to their superior maneuverability and ability to fly in constrained spaces. For example, helicopters flight modes include vertical take-off and landing (VTOL), lateral motion, and hovering. This maneuverability and versatility comes at the expense of complicated system dynamics and mechanisms. In fact, even after many assumptions helicopter dynamics are nonlinear and are subject to a number of disturbances. This project focuses on controller development which incorporates direct compensation for the nonlinearity of the system.
The experimental facility was provided largely in part by an NSERC equipment grant with co-applicants Prof. T. Chen, ECE, University of Alberta, Prof. C.R. (Bob) Koch, MECE, University of Alberta. As of October 2010 the research is supported by an NSERC Strategic Projects Grant entitled "Inspection System for Electrical Transmission Lines Using an Unmanned Aerial Vehicle (UAV)".

Helicopter piloting and mechanical services are generously provided by Mr. André Nadon of the Edmonton Radio Control Helicopter Association (ERCHA). He has been flying radio controlled aircraft since the early 1980's, with an emphasis on helicopters since 2005. He flies all sizes of radio controlled helicopters including electric- and nitro-powered models.
ANCL Helicopter
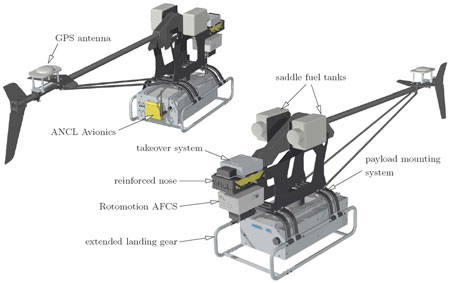
The ANCL Helicopter is based on a Bergen Industrial Twin. The stock helicopter with its 52cc gasoline engine and Futaba PCM radio system has undergone the following modifications:
- a GPS antenna was mounted near the tail
- a provision for saddle fuel tanks was added
- a custom takeover system was included to switch between manual and computer-controlled flight modes
- the fuselage nose was reinforced to provide a rigid mounting area
- a Rotomotion flight controller was added to provide a benchmark for autonomous operation
- the landing gear was extended to provide clearance and crash protection for a payloadan adjustable payload mounting system secures the ANCL Avionics
ANCL Avionics

The ANCL Avionics system is an integrated set of sensors, communications hardware, and computer hardware and software designed to autonomously control the helicopter. The system contains the following major components:
- Microstrain 3DM-GX1 inertial measurement unit (gyroscopes, accelerometers, and magnetometers)
- Novatel OEM4 differential GPS receiver
- Ampro ReadyBoard 800 EPIC form-factor single-board computer with PC/104 I/O stack and 1.4GHz Pentium M CPU running the QNX real-time OS
- Microhard VIP2400 2.4 GHz Ethernet bridge and RS-232 serial gateway
The system is powered by a single Duralite 4300 mAh 7.4V Li-Ion battery pack that yields 50 minutes of continuous typical use. The ANCL Avionics system currently provides the following funcitonality:
- generates and logs helicopter state and status information locally
- wirelessly communicates with a ground station for helicopter state and status monitoring
- generates signals to control helicopter actuators through the takeover system
- reads and logs manual pilot actuator commands through the takeover system
- Controller design and implementation on this system is ongoing. Software development is facilitated by Opal-RT's RT-LAB.
State estimation
The first stage of ANCL Avionics software development included an algorithm to estimate the helicopter state (position, velocity, and attitude). An extended Kalman filter (EKF)-based approach to GPS and inertial navigation system (INS) data fusion was implemented. A successful flight test of this GPS-aided INS algorithm onboard the avionics-equipped ANCL Helicopter was demonstrated in July 2008.